|
АСУ / Автоматизированные системы
АСДУ Э
Назначение
 |
Автоматизированная система диспетчерского управления электроснабжением (АСДУ-Э) предназначена для автоматизации контроля и управления технологическими процессами.
Сферы применения
Система может быть использована в электроэнергетике на объектах электроснабжения электрических сетей промышленных предприятий и городских электрических сетей. |
Функции:
- определение текущего состояния коммутационных элементов;
- измерение текущего значения технологических параметров (токов, напряжений, активной и реактивной мощностей и др.);
- представление информации по измеряемым параметрам в табличной и графической формах;
- выявление изменений контролируемых параметров (выход за уставки измеряемых параметров, срабатывание коммутационных элементов) и оповещение об этом диспетчера;
- ведение протокола текущих и аварийных событий, происходящих как на КП, так и в ПУ;
- передача информации от КП о контролируемых параметрах в ПУ;
- контроль работоспособности каналов связи;
- контроль оперативного напряжения цепей ТУ;
- включение и отключение контролируемых объектов;
- формирование и печать отчетов, например, по аварийным переключениям;
- архивирование всех событий и измерений, ведение базы данных;
- технологический и коммерческий учет электроэнергии.
Структура
 |
АСДУ-Э является территориально распределенной многоуровневой информационно-измерительной централизованной системой реального времени.
Первый уровень - многофункциональные интеллектуальные СЭЭ и микропроцессорные устройства РЗА, а также любые другие ИУ, объединенные цифровым интерфейсом RS-485.
|
Второй уровень системы КП образован контроллерами "ОМЬ-1", к которому подключены ИУ первого уровня, СЭЭ с импульсным выходом, измерительные преобразователи мощности, напряжения, тока и т. п. с токовым выходом. Контроллер "ОМЬ-1" собирает и обрабатывает данные по интерфейсам RS-485 и "токовая петля", считает импульсы, поступающих от СЭЭ в режиме ТИИ, опрашивает контактные датчики в режиме ТС, преобразует и обрабатывает токовые сигналы измерительных преобразователей в режиме ТИТ, а также управляет исполнительными механизмами по командам ТУ, получаемых с верхних уровней. Полученные и предварительно обработанные данные контроллер по каналам связи передает для дальнейшей обработки на третий уровень ПУ.
Третий уровень системы территориально расположен в соответствующей ОДС предприятия и включает в себя:
- оборудование связи;
- сервер телемеханики;
- рабочее место диспетчера;
- рабочее место инженера телемеханики;
- рабочие места удаленных пользователей;
- рабочее место по учету электроэнергии.
Все рабочие места объединены между собой локальной сетью.
Сервер с помощью программного обеспечения выполняет функции центра сбора информации, сопровождения баз данных и ведения архивов, организации доступа пользователей к данным. На уровне ПУ осуществляется визуализация полученной от КП информации и формирование отчетных документов.
Выборочная информация из ПУ может передаваться на более высокие уровни системы по соответствующим каналам связи.
Система синхронизации времени обеспечивает привязку к всемирному (гринвичскому среднему солнечному) времени. Ведущим в управлении системным временем является прецизионные радиочасы, которые принимают сигналы от спутниковой навигационной системы GPS (Глобальная Система Позиционирования) и циклически (каждую секунду) синхронизирует систему через ПЭВМ (сервер телемеханики).
Сервер телемеханики управляющими посылками циклически синхронизирует КП.
Основные технические характеристики
Основные технические характеристики, которые обеспечивает система представлены в таблице.
Наименование параметра |
Значение |
Количество контролируемых пунктов, шт, до |
100 |
Количество каналов по функциям на один КП: |
ТС (2 субблока), до
ТИТ (7 субблоков), до
ТИИ (7 субблоков), до
ТУ (7 субблоков), до |
124
336
216
42 |
Минимальный интервал опроса ТС, ТИТ, ТУ, мин. |
1 |
Первичные преобразователи и измерительные приборы.
Первичные преобразователи и измерительные приборы, применяемые в системе, должны осуществлять преобразование измеряемых параметров в значение силы постоянного тока стандартных диапазонов:
- (0 - 5) мА;
- (4 - 20) мА;
- (0 - 20) мА.
СЭЭ должны иметь импульсные выходы.
Типы и состав измерительных каналов системы:
- каналы измерения переменного тока в режиме ТИТ;
- каналы измерения напряжения переменного тока в режиме ТИТ;
- каналы измерения активной и реактивной мощности в режиме ТИТ;
- каналы измерения активной и реактивной электроэнергии в режиме ТИИ;
- каналы измерения средней активной и реактивной мощностей в режиме ТИИ;
- каналы измерения среднего значения cos j в режиме ТИИ.
Метрологические характеристики
Пределы допускаемой основной погрешности контроллера по каналам телеизмерений составляют +0,25%.
Абсолютная погрешность контроллера по каналам подсчета импульсов составляет +2 импульса на каждые 10000 входных импульсов.
Пределы допускаемого значения относительной погрешности перевода числа импульсов в именованные величины составляют не более +0,05%.
Система предназначена для круглосуточного функционирования в реальном масштабе времени.
Обеспечение единого времени в системеПрограммное обеспечение НПО "Мир" имеет в своем составе модуль привязки к системе единого времени. Модуль устанавливается на сервере, от которого синхронизируются остальные элементы системы.
 |
| Рис.1 Радиочасы МИР РЧ-01 |
Радиочасы "МИР РЧ-01" (рисунок 1) относятся к устройствам синхронизации времени и предназначены для выдачи данных о координированном времени в шкале UTS, принимаемых со спутниковой навигационной системы - Global Positioning System (GPS).
Конструктивно радиочасы представляют собой законченное изделие, состоящее из адаптера А520, приемника и входящей в его состав GPS-спутниковой антенны.
Адаптер А520 обеспечивает питание приемника и преобразование сигналов интерфейса RS-232 в сигналы интерфейса RS-485. Приемник осуществляет прием сигналов координированного времени в шкале UTS со спутниковой системы GPS и выдачу данных в специальном формате по интерфейсу RS-232.
Программное обеспечение
Программное обеспечение, заложенное в ПЭВМ, определяет все функции ПУ и системы в целом.
ПО системы обрабатывает цифровые сигналы, поступающие с выходов контроллеров, и реализует рабочие места диспетчера, инженера телемеханики и удаленных пользователей, например, главного инженера и других.
Рабочее место диспетчера позволяет:
- контролировать состояние и нагрузки объектов электрической сети;
- управлять коммутационным оборудованием подстанций.
Рабочее место инженера телемеханики позволяет:
- создавать графические мнемосхемы новых подстанций и корректировать старые схемы;
- производить привязку схем к средствам телемеханики;
- задавать уставки по аналоговым параметрам (току, напряжению и т.д.);
- контролировать работу средств телемеханики и состояние канала связи между КП и ПУ.
С рабочих мест удаленных пользователей возможно только наблюдение за состоянием и ходом технологического процесса на контролируемых объектах.
ПО, с точки зрения работы в локальных сетях, состоит из следующих компонентов:
- ПО сервера телемеханики;
- ПО рабочих станции телемеханики;
- ПО рабочих станции по учету электроэнергии.
В функции сервера телемеханики входит:
- взаимодействие со средствами телемеханики по радиоканалу;
- рассылка удаленным пользователям накопленных данных за любой промежуток времени по их запросам;
- ретрансляция запросов удаленных пользователей к КП в радиоканал и передача ответов от КП через локальную сеть.
На рабочих станциях телемеханики могут располагаться рабочие места инженера телемеханики, "удаленного" диспетчера и других пользователей, а также рабочие места по учету электроэнергии.
Для сетевого взаимодействия серверов телемеханики и рабочих станций телемеханики в настоящее время используется протокол Netbios. Взаимодействие серверов телемеханики с рабочими станциями учета электроэнергии, а также программами других поставщиков, например, программами управления мнемощитом или советчиком диспетчера, осуществляется через каталоги сетевого файлового сервера.
ПО проверено и эксплуатируется в операционной системе Windows-2000/XP и сетях поддерживаемых Windows.
ПО сервера телемеханики решает следующие задачи:
- выдача запросов и команд к КП, обработка и хранение данных от КП;
- взаимодействие с пользователем (диспетчер, инженер телемеханики и т.д.);
- ведение протокола событий;
- сетевое взаимодействие (ретрансляция команд 10 и сообщений от рабочих станций и КП, передача накопленных данных по запросу на рабочую станцию и т.п.);
- печать протокола и других выходных форм, схем и графиков.
Программа реализована в виде многозадачного монитора, обслуживающего задачи, запускаемые:
- по наступлению определенных событий;
- по времени;
- по запросам и командам пользователя.
Программа "Учет электроэнергии" позволяет выводить различные формы и графики на основе накопленных данных от счетчиков электроэнергии.
Программа использует для взаимодействия с пользователем графический экран, мышь, клавиатуру и принтер. Любую функцию, кроме ввода пароля, можно выполнить, используя мышь.
Парольная защита используется для ограничения доступа к телеуправлению (пароль диспетчера), при корректировке базы данных телемеханики и схем подстанций (пароль инженера телемеханики), а также для ограничения выхода из программы.
При отсутствии событий в системе экран затемняется. На экране отображается только текущее время и текущая функция обмена с КП (визуальный контроль работы).
Основными объектами программы является схема КП и объекты схемы. Примеры схем электрических подстанций приведены на рисунках 2.2 - 2.4.
Схемы КП создаются инженером ТМ с помощью встроенного графического редактора. Схема может содержать до четырех экранов.
Существующая версия редактора использует предопределенный набор элементов схемы. Одновременно с рисованием схемы программа создает шаблон базы данных для привязки объектов схемы к средствам телемеханики.
Состояние объектов схемы отображается тремя цветами:
- зеленый - объект отключен;
- красный - объект включен;
- серый - объект не подключен к системе.
Кроме объектов схемы система может контролировать состояние других дополнительных объектов КП, для которых не предусмотрен графический элемент на схеме. В этом случае объект и его состояния задаются в текстовом виде.
Привязка к телемеханике, задание уставок и установка уровней важности событий осуществляется заполнением таблиц базы данных.
Предусмотрено несколько видов реакций на события, а также отметка цветом в протоколе событий, относящихся к наиболее важным объектам.
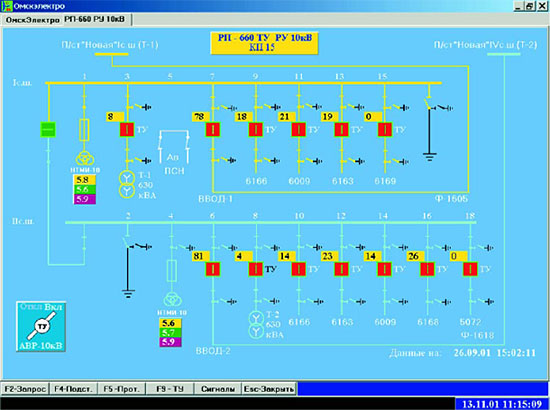 |
Рис.2 Схема электрической подстанции ОАО "Омскэлектро" |
Все данные и схема, относящиеся к одному КП, хранятся в отдельном файле. Это позволяет готовить схему и базу новых КП на отдельном рабочем месте с последующей передачей данных на сервер телемеханики.
Управление потоками данных при обмене ПУ с КП осуществляется в соответствии с ГОСТ 28082-89 "Протокол уровня звена данных". Согласно этому протоколу тип звена данных в системе определяется как многопунктовое полудуплексное звено данных, в котором станция А (ПУ) по очереди обменивается данными в полудуплексном режиме со станциями В1, В2,..., Вn (КП). При этом станция А - первичная станция, станции В1, В2, ..., Вn - вторичные.
Взаимодействие с КП может происходить:
- по командам диспетчера;
- по инициативе КП (отключения, превышение уставок и т.п.);
- по командам удаленного пользователя;
- по времени (периодический опрос).
Типы взаимодействий приведены в порядке убывания приоритета.
Большую часть времени сервер телемеханики выдает в эфир циркулярный запрос с разрешением выхода в эфир для тех КП, у которых изменилось состояние объектов (изменение состояние коммутационных элементов, переход за пороги аналогового сигнала). Определив КП, в котором произошло изменение состояния, сервер телемеханики запрашивает, принимает и обрабатывает информацию от этого КП и выдает ее диспетчеру. От КП поступает полная информация о состоянии всех объектов подстанции на время совершения события.
В циркулярном запросе ПУ передает на КП текущее значение времени, что обеспечивает поддержку синхронизации времени в системе.
В аварийных ситуациях (переключения на большом количестве подстанций) объем информации, поступающей в ПУ, может превышать возможности диспетчера, а порядок поступления не соответствовать ее важности. Для таких ситуаций предусмотрен режим блокировки автоматической выборки информации от КП, и работа происходит только по командам диспетчера.
Периодический опрос используется для получения данных, по которым строятся графики токов нагрузок, напряжений, производится учет электроэнергии.
Программа ведет постоянный контроль состояния связи со всеми КП с записью в протокол и возможностью звуковой сигнализации диспетчеру при пропадании связи с КП. Возможность звуковой сигнализации задается опционно.
Контроль над технологическим процессом ведется автоматически. Вся информация регистрируется в протоколе.
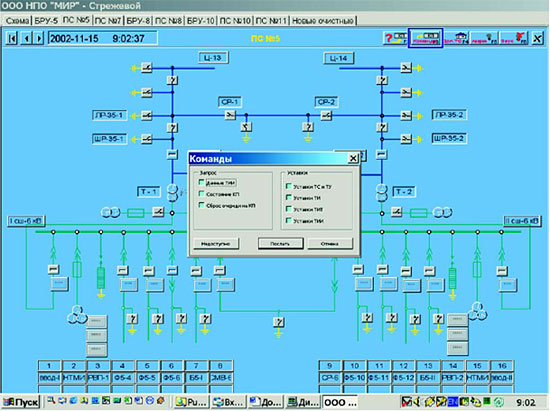 |
Рис.3 Схема электрической подстанции г. Стрежевой |
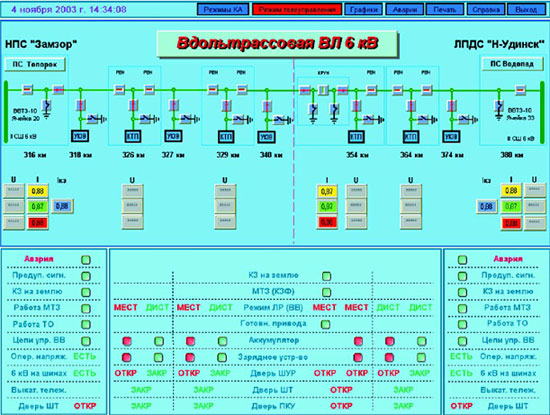 |
Рис.4 Схема электрической подстанции ОАО "Транссибнефть" |
Протокол событий, кроме описания события, содержит два времени:
- время наступления события;
- время записи в протокол.
При просмотре или печати протокол может быть отфильтрован:
- по дате начала и конца периода;
- по подстанции либо одному объекту схемы;
- по типам событий (оперативный, связь, телемеханика).
Время хранения протокола не ограничено. Доступ к архиву не отличается от доступа к текущему протоколу.
При наступлении аварийного события диспетчеру на экран выдается схема соответствующего КП с мигающим значком того объекта, состояние которого изменилось, и транспарант с описанием происшедшего события. Дополнительно мигание сопровождается звуковой сигнализацией.
Диспетчер нажатием клавиши квитирует (подтверждает) получение сообщения. Предусмотрены режимы автоматического и ускоренного квитирования без участия диспетчера, либо при пассивном участии в случае, если терминал и клавиатура установлены на некотором удалении от рабочего места диспетчера, либо диспетчер занят переговорами по телефону или радиостанции. В этом случае диспетчер может наблюдать происходящие события, не отвлекаясь на работу с клавиатурой.
Диспетчер имеет возможность:
- запросить текущее состояние объектов и всех измеряемых значений в целом по подстанции на текущий момент времени;
- управлять объектами подстанции;
- перевести временно часть объектов в состояние ремонта (отключить контроль состояния объекта, например, входной двери, средствами телемеханики);
- вывести на экран и корректировать карточку объекта, содержащую любую справочную информацию;
- просмотреть и напечатать протокол событий;
- вывести на экран и напечатать графики любых измеряемых аналоговых и интегральных параметров.
Подсистема вывода графиков аналоговых величин позволяет строить совместные графики по нескольким выбранным объектам.
Режим ТУ - считается наиболее ответственным в системе. Вход в режим защищен паролем. При входе в режим ТУ программа запрашивает от КП последнее состояние объектов для обеспечения диспетчера информацией о текущем состоянии коммутационной аппаратуры и значениях контролируемых аналоговых параметров.
Непосредственная выдача команды на управление требует дополнительного подтверждения. Результат выполнения команды определяется по фактическому состоянию объекта управления после выполнения команды. Все действия диспетчера по ТУ заносятся в протокол.
В случае неисправности средств телемеханики на объекте или при отсутствии оперативного напряжения ввод команды ТУ блокируется.
Функция самодиагностикиВ АСДУ Э обеспечена автоматическая регистрация отказов и сбоев компонентов системы, времени отключения и восстановления связи с каждым абонентом каналов связи, времени отключения и восстановления питания устройств системы.
Самодиагностика системы проходит на всех трех уровнях иерархической структуры в фоновом режиме. На первом уровне проходит самодиагностика ИУ.
На уровне КП самодиагностику проходит контроллер (субблоки, связь и т.д.). При неисправности в журнал записывается код ошибки.
На верхнем уровне проходит самодиагностика сервера, связи по ЛВС и другим каналам. Сообщения об ошибках квитируются оператором. При возникновении нештатных ситуаций диспетчеру выводятся сообщения с указанием времени, места, вида и причины возникновения нарушения функционирования системы.
|









 Автоматизированные системы
Автоматизированные системы